Denavit–Hartenberg parameters of a 3-link manipulator with prismatic joint - Example bioMechatronics Lab 8:26 1 year ago 27 189 Далее Скачать
me 5243 - 24.2 -representing spatial mechanisms: DH parameters Van de Ven 14:30 3 years ago 7 800 Далее Скачать
Denavit - Hartenberg (DH) Tables For Robotic Systems - Direct Kinematics II ThatsEngineering 11:44 5 years ago 179 649 Далее Скачать
Video Tutorial on forward kinematic for RPR robot Tanveer Saleh 10:25 3 years ago 10 191 Далее Скачать
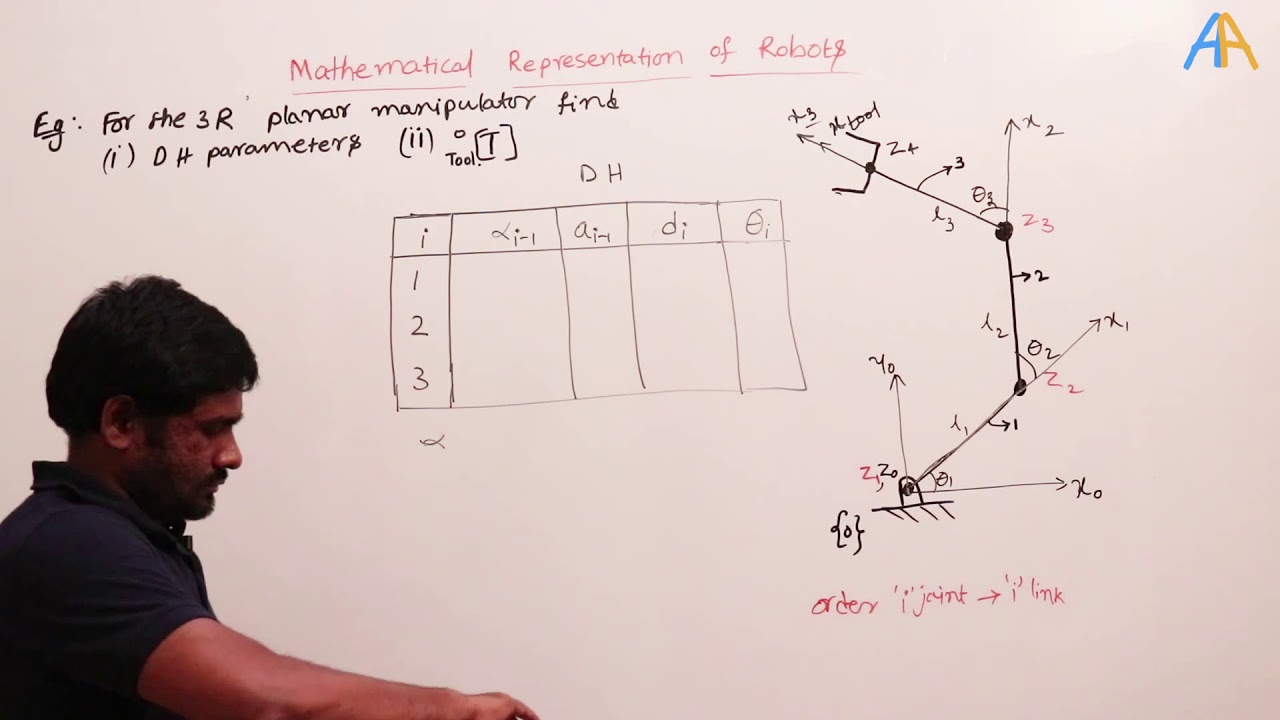
2.10 Robotics || ESE Mains || D-H parameters of 3-R planar robot Adapala Academy 20:33 4 years ago 64 438 Далее Скачать
Denavit – Hartenberg modelling for cylindrical Robot Tanveer Saleh 21:56 3 years ago 51 703 Далее Скачать
Intro2Robotics Lecture 7b: Forward to Inverse Kinematics example Aaron Becker 12:32 4 years ago 44 842 Далее Скачать
Robotics 1 U1 (Kinematics) S5 (HTM) P2 (HTM by Denavit Hartenberg) Angela Sodemann 30:16 7 years ago 278 796 Далее Скачать
Robotics Lec30: Manipulator Kinematics using Denavit-Hartenberg (Part 3 of 3) (Fall 2020) Pranav Bhounsule 50:04 4 years ago 464 Далее Скачать
Intro2Robotics Lecture 5b: Forward kinematics examples Aaron Becker 22:16 4 years ago 6 790 Далее Скачать
Forward Kinematics - Denavit Hartenberg (DH) Method ET 4860 Robotics and Engineering 5:44 3 years ago 7 851 Далее Скачать
Robotics Lec28: Manipulator Kinematics using Denavit-Hartenberg (Part 1 of 3) (Fall 2020) Pranav Bhounsule 25:27 4 years ago 1 306 Далее Скачать
Forward Kinematics (with solved examples) | Homogeneous Transformations | Robotics 101 Engineering Simplified 12:16 2 years ago 66 993 Далее Скачать
Forward Kinematics Using DH Convention Part 2 Engineering Educator Academy 1:23:11 3 years ago 4 902 Далее Скачать
Robotics Lec 18c: Example 2, Denavit Hartenberg, 1R 2P 3D manipulator (3 of 4) (Fall 2023) Pranav Bhounsule 32:01 1 year ago 156 Далее Скачать